精選版 日本国語大辞典 「座標」の意味・読み・例文・類語
ざ‐ひょう ‥ヘウ【座標】
〘名〙
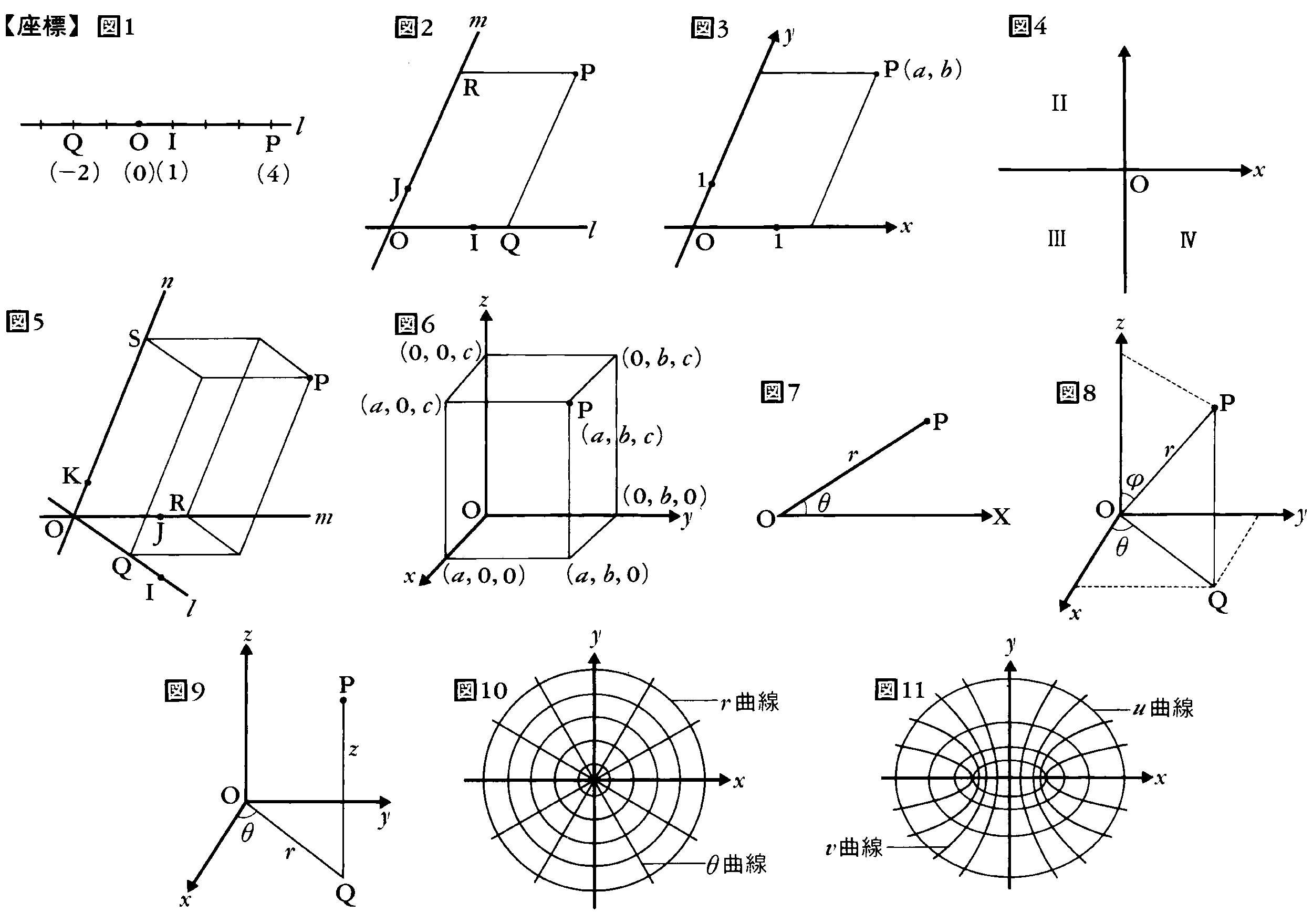
① 点の位置を示す数ないしは数の組。たとえば、直線上に一点Oを固定したとき、その上の点PとOとの距離が a であったならば、PがOの右にあるか左にあるかにしたがって、a または -a をPの(Oを原点とする)座標という。平面、空間、時空間などの点にも種々の方法で座標が与えられるが、いずれにしてもそれらはそれぞれ二つの数の組、三つの数の組、四つの数の組である。〔数学ニ用ヰル辞ノ英和対訳字書(1889)〕
② (比喩的に) 何らかの基準に対する物事の位置づけ。また、その基準となるもの。
※学生と読書(1938)〈河合栄治郎編〉わたしの話〈井上政次〉五「では、われわれは、何処に座標(ceterum censeo)を置けばよいのだ」
出典 精選版 日本国語大辞典精選版 日本国語大辞典について 情報
 で与えられる。空間にも平行座標系が次のように導入される。空間内に4点O,I,J,Kを同一平面上にないように定め,OとI,OとJ,OとKを通る直線をそれぞれl,m,nとする。そして空間内に点Pがあるとき,Pを通りmとnが定める平面に平行な平面がlと交わる点をQ,Pを通りnとlが定める平面に平行な平面がmと交わる点をR,Pを通りlとmが定める平面に平行な平面がnと交わる点をSとして,Oを原点としIを単位点とするl上の座標系に関するQの座標をa,Oを原点としJを単位点とするm上の座標系に関するRの座標をb,Oを原点としKを単位点とするn上の座標系に関するSの座標をcとする(図5)。いま,点Pに実数の組(a,b,c)を対応させれば,空間の点と三つの実数の組が1対1に対応して空間の座標系が得られる。これが空間の平行座標系と呼ばれるもので,Oをその原点,I,J,Kをその単位点という。lをx軸,mをy軸,nをz軸といい,これらを総称して座標軸という。lとmの定める平面をxy平面,mとnの定める平面をyz平面,nとlの定める平面をzx平面といい,これらを総称して
で与えられる。空間にも平行座標系が次のように導入される。空間内に4点O,I,J,Kを同一平面上にないように定め,OとI,OとJ,OとKを通る直線をそれぞれl,m,nとする。そして空間内に点Pがあるとき,Pを通りmとnが定める平面に平行な平面がlと交わる点をQ,Pを通りnとlが定める平面に平行な平面がmと交わる点をR,Pを通りlとmが定める平面に平行な平面がnと交わる点をSとして,Oを原点としIを単位点とするl上の座標系に関するQの座標をa,Oを原点としJを単位点とするm上の座標系に関するRの座標をb,Oを原点としKを単位点とするn上の座標系に関するSの座標をcとする(図5)。いま,点Pに実数の組(a,b,c)を対応させれば,空間の点と三つの実数の組が1対1に対応して空間の座標系が得られる。これが空間の平行座標系と呼ばれるもので,Oをその原点,I,J,Kをその単位点という。lをx軸,mをy軸,nをz軸といい,これらを総称して座標軸という。lとmの定める平面をxy平面,mとnの定める平面をyz平面,nとlの定める平面をzx平面といい,これらを総称して である。
である。 を考えれば,空間内に点Pがあるとき,
を考えれば,空間内に点Pがあるとき, となる実数の組(λ0,λ1,λ2,λ3)が定まり,これはOのとり方によらない。(λ0,λ1,λ2,λ3)を点Pの重心座標という。PがA0,A1,A2,A3を頂点とする4面体の周上または内部にあるとき,λ0≧0,λ1≧0,λ2≧0,λ3≧0で,Pの位置はA0,A1,A2,A3にそれぞれ重さλ0,λ1,λ2,λ3のおもりをおいたときの物理的な重心の位置に一致する。直線上や平面上の重心座標も同様に定義される。
となる実数の組(λ0,λ1,λ2,λ3)が定まり,これはOのとり方によらない。(λ0,λ1,λ2,λ3)を点Pの重心座標という。PがA0,A1,A2,A3を頂点とする4面体の周上または内部にあるとき,λ0≧0,λ1≧0,λ2≧0,λ3≧0で,Pの位置はA0,A1,A2,A3にそれぞれ重さλ0,λ1,λ2,λ3のおもりをおいたときの物理的な重心の位置に一致する。直線上や平面上の重心座標も同様に定義される。 は
は を焦点とする楕円または双曲線を表し,平面上の各点Pに対し,Pを通る上の形の楕円と双曲線が一つずつある。これらに対応するkの値がu,vならば,Pの座標として(u,v)をとり,これをPの
を焦点とする楕円または双曲線を表し,平面上の各点Pに対し,Pを通る上の形の楕円と双曲線が一つずつある。これらに対応するkの値がu,vならば,Pの座標として(u,v)をとり,これをPの は,ある時刻における
は,ある時刻における
 で与えられているとしよう。そのような場合は分子振動や結晶の格子振動において平衡点近傍での振動としてしばしば現れる。このとき直交座標系を{xi}から他の適当な直交座標系{ξi}に変換することにより,互いに独立な(相互作用のない)3N個の調和振動子の集団で置き換えることができる。そのような直交変換は正値対称行列Φ={Φij}を対角形にする,すなわちtTΦT=対角行列となる直交行列Tで与えられる。実際,変換後の運動方程式は,
で与えられているとしよう。そのような場合は分子振動や結晶の格子振動において平衡点近傍での振動としてしばしば現れる。このとき直交座標系を{xi}から他の適当な直交座標系{ξi}に変換することにより,互いに独立な(相互作用のない)3N個の調和振動子の集団で置き換えることができる。そのような直交変換は正値対称行列Φ={Φij}を対角形にする,すなわちtTΦT=対角行列となる直交行列Tで与えられる。実際,変換後の運動方程式は,
 であり,これが0でなければ逆変換xi′=xi′(x)が求められる。J(x′)は座標変数xiでの積分をxi′での積分で表すための体積要素間の関係dx1……dxn=J(x′)dx1′……dxn′にしばしば現れる。三次元極座標(または球座標)への変換(x,y,z)→(r,θ,φ)は球対称性をもつ力学系の問題を扱うのに欠くことのできない曲線座標で,J(r,θ,φ)=r2sinθである。
であり,これが0でなければ逆変換xi′=xi′(x)が求められる。J(x′)は座標変数xiでの積分をxi′での積分で表すための体積要素間の関係dx1……dxn=J(x′)dx1′……dxn′にしばしば現れる。三次元極座標(または球座標)への変換(x,y,z)→(r,θ,φ)は球対称性をもつ力学系の問題を扱うのに欠くことのできない曲線座標で,J(r,θ,φ)=r2sinθである。 は,新しい系では,
は,新しい系では, となる。このように運動座標系に移ることにより元の系での運動方程式は変更される。しかし,とくに平行移動が等速直線運動の場合にはニュートンの運動方程式に変更はないので,運動座標系はまた元の系と同じ慣性系である。
となる。このように運動座標系に移ることにより元の系での運動方程式は変更される。しかし,とくに平行移動が等速直線運動の場合にはニュートンの運動方程式に変更はないので,運動座標系はまた元の系と同じ慣性系である。
 は3行3列の行列として反対称であって,
は3行3列の行列として反対称であって, のようにR(t)に付随したベクトル
のようにR(t)に付随したベクトル とxとのベクトル積で表されることがわかる。なお,行列の反対称とは,転置行列をとると符号が変わること,すなわち,
とxとのベクトル積で表されることがわかる。なお,行列の反対称とは,転置行列をとると符号が変わること,すなわち, であることをいう。このことから前式は,
であることをいう。このことから前式は, の形で表される。これは,運動する質点の速度\(\frac{dx}{dt}\)を回転系でみたときの速度,
の形で表される。これは,運動する質点の速度\(\frac{dx}{dt}\)を回転系でみたときの速度, によって表す基本式で,ベクトル
によって表す基本式で,ベクトル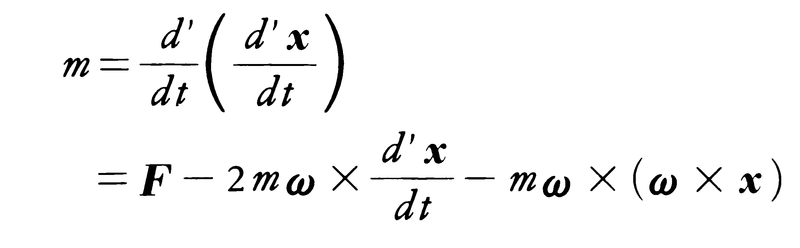
 と-m
と-m